ESCUELA TÉCNICA SUPERIOR DE INGENIERÍA AERONÁUTICA Y DEL ESPACIO
APELLIDOS: DNI:
NOMBRE:
Mecánica Clásica - Problema de Estática Curso: 16/17 Fecha: 10/11/2016
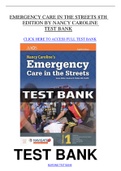
Sea O1 x1 y1 z1 un sistema de referencia inercial, donde O1 z1 es vertical ascendente. Se pretende analizar el equilibrio
respecto a esta referencia del sistema material formado por los dos sólidos homogéneos siguientes:
• la varilla JE (sólido 2), de masa m y longitud a;
• la placa cuadrada ABCD (sólido 3), de masa m y lado a. z1
El extremo J de la varilla se encuentra en contacto bilateral y con
rozamiento sobre el plano O1 x1 z1 . El extremo E se articula en el punto
medio del lado CD mediante un cojinete con restricción axial cuyo eje z4
coincide con CD, manteniendo a la varilla EJ siempre perpendicular
✗ RJZ
a CD.
RJY
La placa cuadrada se apoya sin rozamiento sobre el lado AB en el J " O1
plano O1 x1 y1 . Sea I el punto medio del lado AB. a y1
G 2 REZ y4 1
Sea el sistema auxiliar J ! x4 y4 z4 , cuyo origen J ! es la proyección V
α ✗
2 C
Rsx
ortogonal de J sobre el eje O1 x1 ; su eje J ! x4 tiene la dirección y sentido E t
m
C
F̄ C
del vector J ! I y su eje J ! z4 la dirección y sentido del O1 z1 , por lo que ξ REY
a
JREX
J ! y4 es paralelo a los lados AB y CD de la placa. D
vmg 3
Para definir la posición del sistema se usan las cuatro coordenadas J! G3
generalizadas siguientes:
θ ✗ RI
ξ coordenada cartesiana x1 del extremo J de la varilla. β B
α ángulo que forma JE con JJ ! I
x1 A
✓
mg 4
β ángulo que forma J !I con O1 x1
x4
θ ángulo que forma IE con IJ !
Además de los pesos, sobre el sistema actúa otra fuerza directamente aplicada F̄ C = mg%1 en el vértice C de la
placa.
Se pide:
1) Indicar cuáles son las componentes incógnitas (expresadas en la base de la referencia 1) de la fuerza de contacto
(R̄1/2 ) del plano O1 x1 z1 sobre la varilla en J.
2) Indicar cuáles son las componentes incógnitas (expresadas en la base de la referencia 4) de la resultante (R̄2/3 ) y
2/3
del momento en E (M̄E ) de las fuerzas de contacto sobre la placa debidas a la varilla JE.
3) Indicar cuáles son las componentes incógnitas (expresadas en la base de la referencia 4) de la resultante (R̄1/3 ) y
1/3
del momento en I (M̄I ) de las fuerzas de contacto sobre la placa debidas al plano O1 x1 y1 .
1/3 1/3
Asimismo, determinar el momento de este sistema de fuerzas de contacto en los puntos J y E (M̄J , M̄E ).
Plantear las siguientes ecuaciones de la Estática en términos de las coordenadas generalizadas y de las incógnitas de
contacto de los tres primeros apartados:
4) Para el sistema completo (placa y varilla), la ecuación de equilibrio de momentos respecto a J, expresando sus
componentes en la base de la referencia 4.
5) Para el sistema completo, la ecuación de equilibrio de fuerzas, expresando sus componentes en la base de la referencia
1.
6) Para la placa, la ecuación de equilibrio de fuerzas, expresando sus componentes en la base de la referencia 4.
7) Para la placa, la ecuación de equilibrio de momentos respecto a E, expresando sus componentes en la base de la
referencia 4.
8) Hallar las combinaciones lineales de las ecuaciones de la Estática donde no aparezcan las incógnitas de contacto
de los tres primeros apartados. (AYUDA: hay dos; una es directamente una de las ecuaciones del apartado 4) y la
otra se obtiene combinando una de las ecuaciones del 4) con otra del 7).
Si el contacto del lado AB de la placa con el plano O1 x1 y1 es unilateral y el coeficiente de rozamiento del contacto de
la varilla con el plano O1 x1 z1 es finito y de valor f , se pide:
9) Plantear en función de las incógnitas de contacto de los apartados 1) y 3) las inecuaciones que habrı́a que considerar
además para determinar las posiciones de equilibrio.
10) Expresar las incógnitas de contacto que aparecen en las inecuaciones anteriores en función de las coordenadas
generalizadas.
, "
1) TÍ = Rsixi, + RJYJ, + RJZÉI
PIB
REX-iu-REYI.tl?EZk4-ME2/3=MExEu-MEZk4
2) =
3) TI?/3 > RIEÍU
MÍ/3--141×1-4
1-4 1-4 E4
#
campo de momentos : MI 3--14-1=1/3+17%3 AIJ = MIXÍU -1 O O RIE =
MI✗ 1-4 -
ARIZ / COSP tsenxljcs
akost-senatoasenPIJ-IE-EJ-al-COSO-4-senOK-41-as.cn
-
XÍU ) = -
a / COSO + Sena íu + asen OKI
ÍYJ # = MI✗ 1-4 -
ARIZKOSOTSENXIÍU
Tu 1-4 ÍG
Campo de momentos : ME = MI 1/3-11%-113 /IÍE =
MIXÍY -1
° ° RIZ =
MIMI -
ARIZCOSOYCI
-
ACOSO O serio
t-E-al-cos01-4-senlkylM-EH3-MIxiy-aRI-t.CO 1-4
4) Equilibrio de momentos para el sistema completo :
JGA - absentia 9/20501<4 -
in in En
atsent O -912USD =
mcsasenxjis
2
O O mg
-
JC - JE + EC = asentía -19/215 -
acostéis
1-4 1-4 En
amgcostsenp-lamgsentcosp-akmgsenBIK-4.mg
asent 9/2 -
acosa =
amgcosxcospsíu -
SENBMGCOSB O
JG> =
JE-t-EGs-lasenx-%c0SOJiu-tacost-aksenp.EU
1-4 1-4 Ey
asent -19/2058 O acosa atsenx amg [seno -11/2 coso] jq
-
_
=
O O -
mg
JI - JE-iEI-fasent-acosPJIy-facosa-ase.no] E4
APELLIDOS: DNI:
NOMBRE:
Mecánica Clásica - Problema de Estática Curso: 16/17 Fecha: 10/11/2016
Sea O1 x1 y1 z1 un sistema de referencia inercial, donde O1 z1 es vertical ascendente. Se pretende analizar el equilibrio
respecto a esta referencia del sistema material formado por los dos sólidos homogéneos siguientes:
• la varilla JE (sólido 2), de masa m y longitud a;
• la placa cuadrada ABCD (sólido 3), de masa m y lado a. z1
El extremo J de la varilla se encuentra en contacto bilateral y con
rozamiento sobre el plano O1 x1 z1 . El extremo E se articula en el punto
medio del lado CD mediante un cojinete con restricción axial cuyo eje z4
coincide con CD, manteniendo a la varilla EJ siempre perpendicular
✗ RJZ
a CD.
RJY
La placa cuadrada se apoya sin rozamiento sobre el lado AB en el J " O1
plano O1 x1 y1 . Sea I el punto medio del lado AB. a y1
G 2 REZ y4 1
Sea el sistema auxiliar J ! x4 y4 z4 , cuyo origen J ! es la proyección V
α ✗
2 C
Rsx
ortogonal de J sobre el eje O1 x1 ; su eje J ! x4 tiene la dirección y sentido E t
m
C
F̄ C
del vector J ! I y su eje J ! z4 la dirección y sentido del O1 z1 , por lo que ξ REY
a
JREX
J ! y4 es paralelo a los lados AB y CD de la placa. D
vmg 3
Para definir la posición del sistema se usan las cuatro coordenadas J! G3
generalizadas siguientes:
θ ✗ RI
ξ coordenada cartesiana x1 del extremo J de la varilla. β B
α ángulo que forma JE con JJ ! I
x1 A
✓
mg 4
β ángulo que forma J !I con O1 x1
x4
θ ángulo que forma IE con IJ !
Además de los pesos, sobre el sistema actúa otra fuerza directamente aplicada F̄ C = mg%1 en el vértice C de la
placa.
Se pide:
1) Indicar cuáles son las componentes incógnitas (expresadas en la base de la referencia 1) de la fuerza de contacto
(R̄1/2 ) del plano O1 x1 z1 sobre la varilla en J.
2) Indicar cuáles son las componentes incógnitas (expresadas en la base de la referencia 4) de la resultante (R̄2/3 ) y
2/3
del momento en E (M̄E ) de las fuerzas de contacto sobre la placa debidas a la varilla JE.
3) Indicar cuáles son las componentes incógnitas (expresadas en la base de la referencia 4) de la resultante (R̄1/3 ) y
1/3
del momento en I (M̄I ) de las fuerzas de contacto sobre la placa debidas al plano O1 x1 y1 .
1/3 1/3
Asimismo, determinar el momento de este sistema de fuerzas de contacto en los puntos J y E (M̄J , M̄E ).
Plantear las siguientes ecuaciones de la Estática en términos de las coordenadas generalizadas y de las incógnitas de
contacto de los tres primeros apartados:
4) Para el sistema completo (placa y varilla), la ecuación de equilibrio de momentos respecto a J, expresando sus
componentes en la base de la referencia 4.
5) Para el sistema completo, la ecuación de equilibrio de fuerzas, expresando sus componentes en la base de la referencia
1.
6) Para la placa, la ecuación de equilibrio de fuerzas, expresando sus componentes en la base de la referencia 4.
7) Para la placa, la ecuación de equilibrio de momentos respecto a E, expresando sus componentes en la base de la
referencia 4.
8) Hallar las combinaciones lineales de las ecuaciones de la Estática donde no aparezcan las incógnitas de contacto
de los tres primeros apartados. (AYUDA: hay dos; una es directamente una de las ecuaciones del apartado 4) y la
otra se obtiene combinando una de las ecuaciones del 4) con otra del 7).
Si el contacto del lado AB de la placa con el plano O1 x1 y1 es unilateral y el coeficiente de rozamiento del contacto de
la varilla con el plano O1 x1 z1 es finito y de valor f , se pide:
9) Plantear en función de las incógnitas de contacto de los apartados 1) y 3) las inecuaciones que habrı́a que considerar
además para determinar las posiciones de equilibrio.
10) Expresar las incógnitas de contacto que aparecen en las inecuaciones anteriores en función de las coordenadas
generalizadas.
, "
1) TÍ = Rsixi, + RJYJ, + RJZÉI
PIB
REX-iu-REYI.tl?EZk4-ME2/3=MExEu-MEZk4
2) =
3) TI?/3 > RIEÍU
MÍ/3--141×1-4
1-4 1-4 E4
#
campo de momentos : MI 3--14-1=1/3+17%3 AIJ = MIXÍU -1 O O RIE =
MI✗ 1-4 -
ARIZ / COSP tsenxljcs
akost-senatoasenPIJ-IE-EJ-al-COSO-4-senOK-41-as.cn
-
XÍU ) = -
a / COSO + Sena íu + asen OKI
ÍYJ # = MI✗ 1-4 -
ARIZKOSOTSENXIÍU
Tu 1-4 ÍG
Campo de momentos : ME = MI 1/3-11%-113 /IÍE =
MIXÍY -1
° ° RIZ =
MIMI -
ARIZCOSOYCI
-
ACOSO O serio
t-E-al-cos01-4-senlkylM-EH3-MIxiy-aRI-t.CO 1-4
4) Equilibrio de momentos para el sistema completo :
JGA - absentia 9/20501<4 -
in in En
atsent O -912USD =
mcsasenxjis
2
O O mg
-
JC - JE + EC = asentía -19/215 -
acostéis
1-4 1-4 En
amgcostsenp-lamgsentcosp-akmgsenBIK-4.mg
asent 9/2 -
acosa =
amgcosxcospsíu -
SENBMGCOSB O
JG> =
JE-t-EGs-lasenx-%c0SOJiu-tacost-aksenp.EU
1-4 1-4 Ey
asent -19/2058 O acosa atsenx amg [seno -11/2 coso] jq
-
_
=
O O -
mg
JI - JE-iEI-fasent-acosPJIy-facosa-ase.no] E4