Samenvatting syllabus BA2
Hoofdstuk 1 Inleiding concepten
Leerdoelen:
- Herkennen van vectoren en verschillende coördinatenstelsels en van de partiële afgeleide
- Verklaren van coördinaatwijzigingen en uitvoeren van coördinaattransformatie tussen coördinatenstelsels
- Interpreteren van coördinaten volgens ISB-conventie
- Verklaren en vergelijken van vrijheidsgraden van lichamen
- Beschrijven van foutpropagatie en berekenen van de fout van een functie met meerdere variabelen
Vectoren in 2D en 3D
Een vector bestaat uit een grootte en een richting, hiermee kan de mate van verandering (in kracht en richting) van een
eenheid worden aangegeven. Over het aangrijpingspunt wordt niets gezegd. Er wordt onderscheid gemaakt tussen een
scalaire en een vector door een pijl boven de naam te noteren. Deze vector bestaat uit 3 ruimtelijke dimensies:
𝑣⃗ = 𝑣! 𝑒⃗! + 𝑣" 𝑒⃗" + 𝑣# 𝑒⃗#
Hierin zijn 𝑒⃗! , 𝑒⃗" 𝑒𝑛 𝑒⃗# de basisvectoren naar de punten (1,0,0), (0,1,0) en (0,0,1) vanuit de oorsprong (0,0,0) (Cartesisch
coördinatenstelsel)
Je kunt een vector ook noteren doormiddel van haken;
𝑣⃗ = 〈𝑣! , 𝑣" , 𝑣# 〉
De grootte van een vector is de lengte van de lijn en kan als volgt berekend worden tot een scalaire;
‖𝑣⃗‖ = ,𝑣!$ + 𝑣"$ + 𝑣#$
Een plaats vector is een vector tussen de oorsprong het een punt 𝑃 = (𝑝! , 𝑝" , 𝑝# ) en een vector die loopt tussen een
willekeurig punt 𝐴 = (𝑎! , 𝑎" , 𝑎# ) naar een ander willekeurig punt, worden zo bepaald;
44444⃗
𝑂𝑃 = 〈𝑥% , 𝑦% , 𝑧% 〉
44444⃗
𝐴𝐵 = 〈𝑏! − 𝑎! , 𝑏" − 𝑎" , 𝑏# − 𝑎# 〉
De som van vectoren 𝑐⃗ = 〈𝑐! , 𝑐" , 𝑐# 〉 en 𝑑⃗ = 〈𝑑! , 𝑑" , 𝑑# 〉 wordt berekend door;
𝑐⃗ + 𝑑⃗ = 〈𝑐! + 𝑑! , 𝑐" + 𝑑" , 𝑐# + 𝑑# 〉
En het verschil tussen deze vectoren door;
𝑐⃗ − 𝑑⃗ = 〈𝑐! − 𝑑! , 𝑐" − 𝑑" , 𝑐# − 𝑑# 〉
Bij een scalaire vermenigvuldiging wordt een vector vermenigvuldigd met een constante k, de uitkomst is een vector;
𝑘𝑝⃗ = 〈𝑘𝑝! , 𝑘𝑝" , 𝑘𝑝# 〉
Het inwendig product (dot of scalair) is een vermenigvuldiging tussen 2 vectoren 𝑐⃗ = 〈𝑐! , 𝑐" , 𝑐# 〉 en 𝑑⃗ = 〈𝑑! , 𝑑" , 𝑑# 〉
𝑐⃗ ∙ 𝑑⃗ = 𝑐! 𝑑! + 𝑐" 𝑑" + 𝑐# 𝑑# = ‖𝑐⃗‖?𝑑⃗? cos 𝜃
Een kruisproduct is een vermenigvuldiging tussen twee vectoren, maar heeft als uitkomst een derde vector. Deze
vector staat loodrecht op het vlak dat wordt gevormd door de 1ste en 2de vector. Hij wordt als volgt berekend;
𝑐⃗ × 𝑑⃗ = 〈𝑐" 𝑑# − 𝑑" 𝑐# , −𝑐! 𝑑# + 𝑑! 𝑐# , 𝑐! 𝑑" − 𝑑! 𝑐" 〉
De grootte van het kruisproduct kan wel worden berekend in een scalair, dit gebeurt als volgt;
?𝑐⃗ × 𝑑⃗? = ‖𝑐⃗‖?𝑑⃗? sin 𝜃
Vectoren worden gebruikt bij inverse kinematica, dynamische berekeningen, maar ook om krachten te analyseren. Een
voorbeeld hiervan is dat met vectoren een lokaal assenstelsel kan worden gedefinieerd. Dit kan op zijn beurt weer
gebruikt worden voor het berekenen van hoeken tussen lichaamssegmenten.
,Ten tweede kan het als kracht vector worden gebruikt in een lokaal coördinatenstelsel van een krachtplaat. De richting
van de drie componenten van 𝐹⃗ = 〈𝐹! , 𝐹" , 𝐹# 〉 . Ook kan het gebruikt worden om de kracht en richting van het scapula
uit te drukken (voor voorbeelden zie figuur 1.3)
Coördinatenstelsels
Het is een referentiekader waarin een positie of hoek kan worden
gedefinieerd, het bestaat uit 1 of meerdere rechte lijnen die elkaar snijden
in de oorsprong. In BA2 behandelen we 2 verschillende coördinatenstelsels
het Cartesisch (links) en Polar (rechts) stelsel. Beide kunnen de een positie
in 2D en 3D beschrijven.
In een Cartesisch stelsel zijn de punten loodrechte projecties van dat punt
op de as. In een Polar stelsel zijn de afstanden vanaf de oorsprong. Je kunt
de coördinaten beide kanten op omzetten door gebruikt te maken van Pythagoras en goniometrische functies
De ISB heeft de assen van het Cartesische stelsel georiënteerd in specifieke richtingen; x-as wijst voorwaarts, y-as naar
boven en z-as in de zijlinkse richting
Vrijheidsgraden
Belangrijk voor het beschrijven van een beweging. Een puntlichaam neemt geen ruimte in en kan niet van oriëntatie
veranderen, er is alleen sprake van positie en niet van rotatie. Een star lichaam is een onvervormbaar lichaam, de
afstand tussen elke twee punten op dit lichaam is onveranderlijk. Hier is dus wel sprake van rotatie.
In een 2-dimensionaal vlak heeft een punt lichaam dus 2 vrijheidsgraden, aangezien deze langs 2 assen kan bewegen.
Een starlichaam heeft er echter 3 want deze heeft
ook nog een bepaalde hoek die hij kan aannemen. 3-Dimensionaal Vector Berekeningen
Polar 𝑃(𝑟, ∅, 𝜃) 𝑟 = ,(𝑥5$ + 𝑦5$ + 𝑧5$ )
2-Dimensionaal Vector Berekeningen
Polar 𝑃(𝑟, ∅) "
𝑟 = ,(𝑥5$ + 𝑦5$ ) 𝜑 = arctan (!#)
#
"
𝜑 = tan2, (!#) " /" "
6!# #
#
𝜃 = arctan ( # )
Cartesisch 𝑃(𝑥, 𝑦)
𝑥5 = 𝑟 cos 𝜑 #
𝑦5 = 𝑟 sin 𝜑 Cartesisch 𝑃(𝑥, 𝑦, 𝑧) 𝑥5 = 𝑟 sin 𝜃 cos 𝜑
In een 3-dimensionaal stelsel kan een punt lichaam 𝑦5 = 𝑟 sin 𝜃 sin 𝜑
over 3 assen bewegen en heeft dus 3 vrijheidsgraden. 𝑧5 = 𝑟 cos 𝜃
Een starlichaam kan dit ook, maar kan ook om deze 3 assen roteren en heeft dus 6 vrijheidsgraden. Formules 1.22 t/m
1.25 geven berekeningen voor DoF ook nog weer. Extra: een globaal stelsel is verbonden met de wereld en een lokaal
stelsel met een bewegend object.
Fout propagatie
Elke variabele heeft een bekende absolute fout, een onnauwkeurigheid vanwege beperkingen van de
meetinstrumenten. Om de fout te bepalen gebruik je de foutpropagatieformule, met k onafhankelijke variabelen:
&' &' &'
∆𝑧 = I&! I ∆𝑥 + I&"I ∆𝑦+. . . = ∑*)+, I&( I ∆𝑤)
!
Hier in is de grootheid z in de variabele x,y etc. beschreven met de bekende fouten (∆𝑥, ∆𝑦), 𝑤) is hier een willekeurige
&'
variabele en I&!I zijn de partiële afgeleide, de strepen eromheen betekend dat het een absolute waarde is. Geef aan
welke variabele je wil afleiden en zie de rest als constante. Stel bijvoorbeeld dat een punt P rechthoekige coördinaten
x = 5 cm en y = -9 cm heeft. Beiden coördinaten hebben een absolute fout van 2 mm. Hoe groot is de absoute fout in de
afstand r van P naar de oorsprong?
𝑟 = ,𝑥 $ + 𝑦 $ = ,5$ + (−9)$ = 10,3 𝑐𝑚
&- ! &- "
I I= , I I= , ∆𝑥, ∆𝑦 = 2 𝑚𝑚
&! .! " /" " &" .! " /" "
0 23
∆𝑟 = U U ∆𝑥 + U.0" U ∆𝑦 = 2,7 𝑚𝑚
.0" /(23)" /(23)"
Dus r = 10,3 ± 0,27 cm
, Partiële afgeleiden
Deze afgeleide geeft de mate van verandering van een functie wanneer de onafhankelijke variabele veranderd.
Wanneer de functie uit meer dan 1 variabele bestaat, is de mate van verandering van f afhankelijk van de keuze van de
variabele, de functie kan bijvoorbeeld sneller veranderen met betrekking tot de ene variabele en langzamer met
betrekking tot een andere variabele. Denk aan wiskunde, komt terug.
Hoofdstuk 2 Meten: Beweging en krachten
Leerdoelen
- Verklaren van het verschil tussen continue en discrete data
- Uitvoeren van numeriek differentiëren en integreren
- Verklaren van verschillende metingssystemen en sensoren
- Berekenen van segmentoriëntatie vanaf positiedata en interpreteren van hoekwijzigingen
- Interpreteren van accelerometer-, gyroscoopsignalen en krachtplaat data.
Continue vs. Discrete data
Bij continue date kunnen de veranderingen als functie van tijd op elke willekeurig tijdstip worden beschreven. De
afgeleiden en integraal gaan via analytische wijze. Bij discrete signalen zijn de veranderingen op discrete tijdstippen
beschikbaar en wordt de afgeleide of integraal bepaald op een numerieke manier.
Theorema van Shannon
De regel dat de bemonsteringsfrequentie (𝑓7 ) tenminste 2x zo groot moet zijn als de hoogste frequentie (𝑓89! )
aanwezig in het signaal, dit om aliasing effecten tegen te gaan die ervoor zorgen dat het originele signaal niet goed
wordt overgebracht.
Numeriek differentiëren
Differentiëren wordt gebruik om bijvoorbeeld de snelheid uit de positie te halen. Bij een discreet signaal doet men dit
:
numeriek en niet zoals bij continu door middel van :;. Bij numeriek wordt de afgeleide op een punt geschat met behulp
van de differentiequotiënt. Indien 𝑥< = 𝑥(𝑛) de digitale waarde van het te differentiëren signaal voorstelt en 𝑦< =
𝑦(𝑛) de waarden van de schatten van de afgeleide op punt n, dan wordt 𝑦< als volgt berekend:
!$%& 2!$'& !$%& 2!$'&
𝑦< = = 𝑓7
$=( $
Hierbij is n een positief geheel getale en 𝑇7 de tijdstap. Voor de snelheid en versnelling geldt;
!$%& 2!$'& !$%& 2!$'& !$%& 2$!$ /!$'&
𝑣) = 𝑎) = =
$=( $=( (=( )"
Er zijn een paar mogelijke manier om de differentie quotiënt in een punt te benaderen; Central
difference, Forward difference, Backward difference. Als je online differentieert, dat betekent
dat je het realtime doet op het moment dat het signaal binnen komt, want je kan alleen maar terug in de tijd en niet
vooruit want dat signaal moet immers nog komen. Offline wordt central difference het meest gebruikt omdat dit in de
meeste gevallen het meest nauwkeurig is.
Als je differentieert worden hoge frequenties meer versterkt dan lage frequenties, het effect kun je ziek door het weer
,
te geven in een amplitudediagram. Er geldt namelijk: 𝑦(𝑡) = 𝐴 sin(𝜔𝑡) > 𝑦 > (𝑡) = 𝐴𝜔 cos(𝜔𝑡) = 𝐴𝜔 sin(𝜔𝑡 + 𝜋)
$
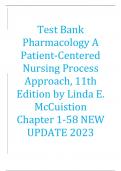
Numeriek integreren
Integreren is tegen de richting van differentiëren in. Bij een discreet signaal wordt een
schatting gemaakt van het oppervlak onder een signaal binnen een bepaald
tijdsinterval in tegenstelling tot een continu signaal waar ∫ 𝑑𝑡 wordt gebruikt. Een veel
gebruikte methode is de trapeziumregel, er wordt een ‘staafdiagram’ gemaakt. Voor
het oppervlak van elke staaf wordt de lengte vermenigvuldigt met de breedte, deze
worden vervolgens bij elkaar opgeteld, zie hiernaast.
De wiskundige formulering is als volgt:
!$'& /!$ !$ /!$%& ,
𝐼? =. . . + d $
e 𝑇@ + d $
e 𝑇@ +. . . ≈ ∑? ?
<+, 𝑥< 𝑇@ = ' ∑<+, 𝑥<
)
Hoofdstuk 1 Inleiding concepten
Leerdoelen:
- Herkennen van vectoren en verschillende coördinatenstelsels en van de partiële afgeleide
- Verklaren van coördinaatwijzigingen en uitvoeren van coördinaattransformatie tussen coördinatenstelsels
- Interpreteren van coördinaten volgens ISB-conventie
- Verklaren en vergelijken van vrijheidsgraden van lichamen
- Beschrijven van foutpropagatie en berekenen van de fout van een functie met meerdere variabelen
Vectoren in 2D en 3D
Een vector bestaat uit een grootte en een richting, hiermee kan de mate van verandering (in kracht en richting) van een
eenheid worden aangegeven. Over het aangrijpingspunt wordt niets gezegd. Er wordt onderscheid gemaakt tussen een
scalaire en een vector door een pijl boven de naam te noteren. Deze vector bestaat uit 3 ruimtelijke dimensies:
𝑣⃗ = 𝑣! 𝑒⃗! + 𝑣" 𝑒⃗" + 𝑣# 𝑒⃗#
Hierin zijn 𝑒⃗! , 𝑒⃗" 𝑒𝑛 𝑒⃗# de basisvectoren naar de punten (1,0,0), (0,1,0) en (0,0,1) vanuit de oorsprong (0,0,0) (Cartesisch
coördinatenstelsel)
Je kunt een vector ook noteren doormiddel van haken;
𝑣⃗ = 〈𝑣! , 𝑣" , 𝑣# 〉
De grootte van een vector is de lengte van de lijn en kan als volgt berekend worden tot een scalaire;
‖𝑣⃗‖ = ,𝑣!$ + 𝑣"$ + 𝑣#$
Een plaats vector is een vector tussen de oorsprong het een punt 𝑃 = (𝑝! , 𝑝" , 𝑝# ) en een vector die loopt tussen een
willekeurig punt 𝐴 = (𝑎! , 𝑎" , 𝑎# ) naar een ander willekeurig punt, worden zo bepaald;
44444⃗
𝑂𝑃 = 〈𝑥% , 𝑦% , 𝑧% 〉
44444⃗
𝐴𝐵 = 〈𝑏! − 𝑎! , 𝑏" − 𝑎" , 𝑏# − 𝑎# 〉
De som van vectoren 𝑐⃗ = 〈𝑐! , 𝑐" , 𝑐# 〉 en 𝑑⃗ = 〈𝑑! , 𝑑" , 𝑑# 〉 wordt berekend door;
𝑐⃗ + 𝑑⃗ = 〈𝑐! + 𝑑! , 𝑐" + 𝑑" , 𝑐# + 𝑑# 〉
En het verschil tussen deze vectoren door;
𝑐⃗ − 𝑑⃗ = 〈𝑐! − 𝑑! , 𝑐" − 𝑑" , 𝑐# − 𝑑# 〉
Bij een scalaire vermenigvuldiging wordt een vector vermenigvuldigd met een constante k, de uitkomst is een vector;
𝑘𝑝⃗ = 〈𝑘𝑝! , 𝑘𝑝" , 𝑘𝑝# 〉
Het inwendig product (dot of scalair) is een vermenigvuldiging tussen 2 vectoren 𝑐⃗ = 〈𝑐! , 𝑐" , 𝑐# 〉 en 𝑑⃗ = 〈𝑑! , 𝑑" , 𝑑# 〉
𝑐⃗ ∙ 𝑑⃗ = 𝑐! 𝑑! + 𝑐" 𝑑" + 𝑐# 𝑑# = ‖𝑐⃗‖?𝑑⃗? cos 𝜃
Een kruisproduct is een vermenigvuldiging tussen twee vectoren, maar heeft als uitkomst een derde vector. Deze
vector staat loodrecht op het vlak dat wordt gevormd door de 1ste en 2de vector. Hij wordt als volgt berekend;
𝑐⃗ × 𝑑⃗ = 〈𝑐" 𝑑# − 𝑑" 𝑐# , −𝑐! 𝑑# + 𝑑! 𝑐# , 𝑐! 𝑑" − 𝑑! 𝑐" 〉
De grootte van het kruisproduct kan wel worden berekend in een scalair, dit gebeurt als volgt;
?𝑐⃗ × 𝑑⃗? = ‖𝑐⃗‖?𝑑⃗? sin 𝜃
Vectoren worden gebruikt bij inverse kinematica, dynamische berekeningen, maar ook om krachten te analyseren. Een
voorbeeld hiervan is dat met vectoren een lokaal assenstelsel kan worden gedefinieerd. Dit kan op zijn beurt weer
gebruikt worden voor het berekenen van hoeken tussen lichaamssegmenten.
,Ten tweede kan het als kracht vector worden gebruikt in een lokaal coördinatenstelsel van een krachtplaat. De richting
van de drie componenten van 𝐹⃗ = 〈𝐹! , 𝐹" , 𝐹# 〉 . Ook kan het gebruikt worden om de kracht en richting van het scapula
uit te drukken (voor voorbeelden zie figuur 1.3)
Coördinatenstelsels
Het is een referentiekader waarin een positie of hoek kan worden
gedefinieerd, het bestaat uit 1 of meerdere rechte lijnen die elkaar snijden
in de oorsprong. In BA2 behandelen we 2 verschillende coördinatenstelsels
het Cartesisch (links) en Polar (rechts) stelsel. Beide kunnen de een positie
in 2D en 3D beschrijven.
In een Cartesisch stelsel zijn de punten loodrechte projecties van dat punt
op de as. In een Polar stelsel zijn de afstanden vanaf de oorsprong. Je kunt
de coördinaten beide kanten op omzetten door gebruikt te maken van Pythagoras en goniometrische functies
De ISB heeft de assen van het Cartesische stelsel georiënteerd in specifieke richtingen; x-as wijst voorwaarts, y-as naar
boven en z-as in de zijlinkse richting
Vrijheidsgraden
Belangrijk voor het beschrijven van een beweging. Een puntlichaam neemt geen ruimte in en kan niet van oriëntatie
veranderen, er is alleen sprake van positie en niet van rotatie. Een star lichaam is een onvervormbaar lichaam, de
afstand tussen elke twee punten op dit lichaam is onveranderlijk. Hier is dus wel sprake van rotatie.
In een 2-dimensionaal vlak heeft een punt lichaam dus 2 vrijheidsgraden, aangezien deze langs 2 assen kan bewegen.
Een starlichaam heeft er echter 3 want deze heeft
ook nog een bepaalde hoek die hij kan aannemen. 3-Dimensionaal Vector Berekeningen
Polar 𝑃(𝑟, ∅, 𝜃) 𝑟 = ,(𝑥5$ + 𝑦5$ + 𝑧5$ )
2-Dimensionaal Vector Berekeningen
Polar 𝑃(𝑟, ∅) "
𝑟 = ,(𝑥5$ + 𝑦5$ ) 𝜑 = arctan (!#)
#
"
𝜑 = tan2, (!#) " /" "
6!# #
#
𝜃 = arctan ( # )
Cartesisch 𝑃(𝑥, 𝑦)
𝑥5 = 𝑟 cos 𝜑 #
𝑦5 = 𝑟 sin 𝜑 Cartesisch 𝑃(𝑥, 𝑦, 𝑧) 𝑥5 = 𝑟 sin 𝜃 cos 𝜑
In een 3-dimensionaal stelsel kan een punt lichaam 𝑦5 = 𝑟 sin 𝜃 sin 𝜑
over 3 assen bewegen en heeft dus 3 vrijheidsgraden. 𝑧5 = 𝑟 cos 𝜃
Een starlichaam kan dit ook, maar kan ook om deze 3 assen roteren en heeft dus 6 vrijheidsgraden. Formules 1.22 t/m
1.25 geven berekeningen voor DoF ook nog weer. Extra: een globaal stelsel is verbonden met de wereld en een lokaal
stelsel met een bewegend object.
Fout propagatie
Elke variabele heeft een bekende absolute fout, een onnauwkeurigheid vanwege beperkingen van de
meetinstrumenten. Om de fout te bepalen gebruik je de foutpropagatieformule, met k onafhankelijke variabelen:
&' &' &'
∆𝑧 = I&! I ∆𝑥 + I&"I ∆𝑦+. . . = ∑*)+, I&( I ∆𝑤)
!
Hier in is de grootheid z in de variabele x,y etc. beschreven met de bekende fouten (∆𝑥, ∆𝑦), 𝑤) is hier een willekeurige
&'
variabele en I&!I zijn de partiële afgeleide, de strepen eromheen betekend dat het een absolute waarde is. Geef aan
welke variabele je wil afleiden en zie de rest als constante. Stel bijvoorbeeld dat een punt P rechthoekige coördinaten
x = 5 cm en y = -9 cm heeft. Beiden coördinaten hebben een absolute fout van 2 mm. Hoe groot is de absoute fout in de
afstand r van P naar de oorsprong?
𝑟 = ,𝑥 $ + 𝑦 $ = ,5$ + (−9)$ = 10,3 𝑐𝑚
&- ! &- "
I I= , I I= , ∆𝑥, ∆𝑦 = 2 𝑚𝑚
&! .! " /" " &" .! " /" "
0 23
∆𝑟 = U U ∆𝑥 + U.0" U ∆𝑦 = 2,7 𝑚𝑚
.0" /(23)" /(23)"
Dus r = 10,3 ± 0,27 cm
, Partiële afgeleiden
Deze afgeleide geeft de mate van verandering van een functie wanneer de onafhankelijke variabele veranderd.
Wanneer de functie uit meer dan 1 variabele bestaat, is de mate van verandering van f afhankelijk van de keuze van de
variabele, de functie kan bijvoorbeeld sneller veranderen met betrekking tot de ene variabele en langzamer met
betrekking tot een andere variabele. Denk aan wiskunde, komt terug.
Hoofdstuk 2 Meten: Beweging en krachten
Leerdoelen
- Verklaren van het verschil tussen continue en discrete data
- Uitvoeren van numeriek differentiëren en integreren
- Verklaren van verschillende metingssystemen en sensoren
- Berekenen van segmentoriëntatie vanaf positiedata en interpreteren van hoekwijzigingen
- Interpreteren van accelerometer-, gyroscoopsignalen en krachtplaat data.
Continue vs. Discrete data
Bij continue date kunnen de veranderingen als functie van tijd op elke willekeurig tijdstip worden beschreven. De
afgeleiden en integraal gaan via analytische wijze. Bij discrete signalen zijn de veranderingen op discrete tijdstippen
beschikbaar en wordt de afgeleide of integraal bepaald op een numerieke manier.
Theorema van Shannon
De regel dat de bemonsteringsfrequentie (𝑓7 ) tenminste 2x zo groot moet zijn als de hoogste frequentie (𝑓89! )
aanwezig in het signaal, dit om aliasing effecten tegen te gaan die ervoor zorgen dat het originele signaal niet goed
wordt overgebracht.
Numeriek differentiëren
Differentiëren wordt gebruik om bijvoorbeeld de snelheid uit de positie te halen. Bij een discreet signaal doet men dit
:
numeriek en niet zoals bij continu door middel van :;. Bij numeriek wordt de afgeleide op een punt geschat met behulp
van de differentiequotiënt. Indien 𝑥< = 𝑥(𝑛) de digitale waarde van het te differentiëren signaal voorstelt en 𝑦< =
𝑦(𝑛) de waarden van de schatten van de afgeleide op punt n, dan wordt 𝑦< als volgt berekend:
!$%& 2!$'& !$%& 2!$'&
𝑦< = = 𝑓7
$=( $
Hierbij is n een positief geheel getale en 𝑇7 de tijdstap. Voor de snelheid en versnelling geldt;
!$%& 2!$'& !$%& 2!$'& !$%& 2$!$ /!$'&
𝑣) = 𝑎) = =
$=( $=( (=( )"
Er zijn een paar mogelijke manier om de differentie quotiënt in een punt te benaderen; Central
difference, Forward difference, Backward difference. Als je online differentieert, dat betekent
dat je het realtime doet op het moment dat het signaal binnen komt, want je kan alleen maar terug in de tijd en niet
vooruit want dat signaal moet immers nog komen. Offline wordt central difference het meest gebruikt omdat dit in de
meeste gevallen het meest nauwkeurig is.
Als je differentieert worden hoge frequenties meer versterkt dan lage frequenties, het effect kun je ziek door het weer
,
te geven in een amplitudediagram. Er geldt namelijk: 𝑦(𝑡) = 𝐴 sin(𝜔𝑡) > 𝑦 > (𝑡) = 𝐴𝜔 cos(𝜔𝑡) = 𝐴𝜔 sin(𝜔𝑡 + 𝜋)
$
Numeriek integreren
Integreren is tegen de richting van differentiëren in. Bij een discreet signaal wordt een
schatting gemaakt van het oppervlak onder een signaal binnen een bepaald
tijdsinterval in tegenstelling tot een continu signaal waar ∫ 𝑑𝑡 wordt gebruikt. Een veel
gebruikte methode is de trapeziumregel, er wordt een ‘staafdiagram’ gemaakt. Voor
het oppervlak van elke staaf wordt de lengte vermenigvuldigt met de breedte, deze
worden vervolgens bij elkaar opgeteld, zie hiernaast.
De wiskundige formulering is als volgt:
!$'& /!$ !$ /!$%& ,
𝐼? =. . . + d $
e 𝑇@ + d $
e 𝑇@ +. . . ≈ ∑? ?
<+, 𝑥< 𝑇@ = ' ∑<+, 𝑥<
)