Oxford Cambridge and RSA
Tuesday 10 June 2025 – Morning
A Level in Design and Technology:
Design Engineering
H404/02 Problem Solving in Design Engineering
Resource Booklet
* 1 9 3 9 7 5 7 4 1 0 *
Time allowed: 1 hour 45 minutes
INSTRUCTIONS
• Use this Resource Booklet to answer all the questions.
• You should spend 35 minutes reading this Resource Booklet.
• Do not send this Resource Booklet for marking. Keep it in the centre or recycle it.
INFORMATION
• This document has 12 pages.
ADVICE
• Read this Resource Booklet carefully before you start your answers.
© OCR 2025 [603/1131/9] OCR is an exempt Charity
DC (ST/SG) 358474/2 Turn over
for more: tyrionpapers.com
, 2
The stimulus in this booklet relates to issues and opportunities that may be encountered when
developing and deploying equipment used in disaster relief.
Technology Used in Disaster Relief
Communities can face significant danger from earthquakes, floods, wildfires and other natural
disasters. During and after disasters, emergency workers rely on equipment to tackle the disaster
directly and to help in the search and rescue of victims. Often victims need help after becoming
trapped in building fires, crashes or after becoming stranded in mountainous terrain.
The Development of Rescue Vehicles
In the 1970s, early rescue equipment primarily consisted of manual tools and basic mechanical
devices. Remote controlled systems began to appear, but they were often confined to simple vehicles
connected to a control cable. Radio-controlled vehicles were developed but most struggled with the
strength and reliability of the signal.
The 1990s saw more advanced robotic systems equipped with cameras and sensors. These were
developed to access hazardous environments such as collapsed buildings or mines to aid in locating
and rescuing trapped individuals. During this time, autonomous vehicles such as Autonomous
Underwater Vehicles (AUVs) also began to be developed – see Fig. 1.
Fig. 1
These vehicles began to be used for search and rescue missions, being equipped with sonar and
cameras to scan underwater environments. They were designed to operate in the cold and high
pressure of the deep oceans where communicating with the vehicle is a huge challenge.
During the 2000s Unmanned Aerial Vehicles (UAVs) or ‘drones’ have become increasingly
sophisticated. They can carry high resolution cameras and thermal imaging sensors and can be
quickly deployed for aerial search and rescue. This allows a large search area to be covered in
a short period of time. Already these systems have saved multiple lives by finding lost or isolated
casualties quickly and they will continue to do so as the systems develop even further.
© OCR 2025 H404/02/RB Jun25
for more: tyrionpapers.com
, 3
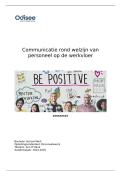
Fire‑Fighting Robot
The Magirus Aircore TAF35 (see Fig. 2) is a remote-controlled fire-fighting robot. It is designed to
assist firefighters in extinguishing fires, particularly fires spread over a large area such as wildfires.
The robot is designed to run ahead and reach the source of the fire without risking the lives of
firefighters. It has a wireless remote-control range up to 300 m.
The robot can be fitted with cameras and thermal imagers. A variety of tools can also be attached, for
example, lifting forks to move debris or to transport vulnerable materials away from the fire. It can pull
loads up to 3.8 tonnes.
The Aircore concept uses a powerful air turbine to create a water mist which effectively cools the
fire with minimum water usage. The jet can be projected up to 80 m. It also clears smoke, improving
visibility for fighting the fire. The TAF35 is powered by a diesel engine which provides drive to the
rubber tracks and provides power to the turbine. It can operate autonomously for up to seven hours.
Fig. 2
Magirus Aircore TAF35 Fire‑fighting Robot:
water turbine
front shield
Features:
• L iftable and tiltable water turbine.
• Turbine emits 4700 l / min water at
16 bar pressure.
• Throws water up to 80 m.
lifting forks can
be fitted
© OCR 2025 H404/02/RB Jun25 Turn over
for more: tyrionpapers.com
Tuesday 10 June 2025 – Morning
A Level in Design and Technology:
Design Engineering
H404/02 Problem Solving in Design Engineering
Resource Booklet
* 1 9 3 9 7 5 7 4 1 0 *
Time allowed: 1 hour 45 minutes
INSTRUCTIONS
• Use this Resource Booklet to answer all the questions.
• You should spend 35 minutes reading this Resource Booklet.
• Do not send this Resource Booklet for marking. Keep it in the centre or recycle it.
INFORMATION
• This document has 12 pages.
ADVICE
• Read this Resource Booklet carefully before you start your answers.
© OCR 2025 [603/1131/9] OCR is an exempt Charity
DC (ST/SG) 358474/2 Turn over
for more: tyrionpapers.com
, 2
The stimulus in this booklet relates to issues and opportunities that may be encountered when
developing and deploying equipment used in disaster relief.
Technology Used in Disaster Relief
Communities can face significant danger from earthquakes, floods, wildfires and other natural
disasters. During and after disasters, emergency workers rely on equipment to tackle the disaster
directly and to help in the search and rescue of victims. Often victims need help after becoming
trapped in building fires, crashes or after becoming stranded in mountainous terrain.
The Development of Rescue Vehicles
In the 1970s, early rescue equipment primarily consisted of manual tools and basic mechanical
devices. Remote controlled systems began to appear, but they were often confined to simple vehicles
connected to a control cable. Radio-controlled vehicles were developed but most struggled with the
strength and reliability of the signal.
The 1990s saw more advanced robotic systems equipped with cameras and sensors. These were
developed to access hazardous environments such as collapsed buildings or mines to aid in locating
and rescuing trapped individuals. During this time, autonomous vehicles such as Autonomous
Underwater Vehicles (AUVs) also began to be developed – see Fig. 1.
Fig. 1
These vehicles began to be used for search and rescue missions, being equipped with sonar and
cameras to scan underwater environments. They were designed to operate in the cold and high
pressure of the deep oceans where communicating with the vehicle is a huge challenge.
During the 2000s Unmanned Aerial Vehicles (UAVs) or ‘drones’ have become increasingly
sophisticated. They can carry high resolution cameras and thermal imaging sensors and can be
quickly deployed for aerial search and rescue. This allows a large search area to be covered in
a short period of time. Already these systems have saved multiple lives by finding lost or isolated
casualties quickly and they will continue to do so as the systems develop even further.
© OCR 2025 H404/02/RB Jun25
for more: tyrionpapers.com
, 3
Fire‑Fighting Robot
The Magirus Aircore TAF35 (see Fig. 2) is a remote-controlled fire-fighting robot. It is designed to
assist firefighters in extinguishing fires, particularly fires spread over a large area such as wildfires.
The robot is designed to run ahead and reach the source of the fire without risking the lives of
firefighters. It has a wireless remote-control range up to 300 m.
The robot can be fitted with cameras and thermal imagers. A variety of tools can also be attached, for
example, lifting forks to move debris or to transport vulnerable materials away from the fire. It can pull
loads up to 3.8 tonnes.
The Aircore concept uses a powerful air turbine to create a water mist which effectively cools the
fire with minimum water usage. The jet can be projected up to 80 m. It also clears smoke, improving
visibility for fighting the fire. The TAF35 is powered by a diesel engine which provides drive to the
rubber tracks and provides power to the turbine. It can operate autonomously for up to seven hours.
Fig. 2
Magirus Aircore TAF35 Fire‑fighting Robot:
water turbine
front shield
Features:
• L iftable and tiltable water turbine.
• Turbine emits 4700 l / min water at
16 bar pressure.
• Throws water up to 80 m.
lifting forks can
be fitted
© OCR 2025 H404/02/RB Jun25 Turn over
for more: tyrionpapers.com