STATICS – this is the study of bodies at rest or of forces in equilibrium (i.e. in balance). A body is
in equilibrium when the forces on it balance each other so that it either:
remains at rest or, if it is moving,
remains in a state of uniform motion (i.e. constant speed in a straight line).
To understand equilibrium it has to be recognised that forces can influence, or try to influence, the
motion of a body in two ways:
they can affect its translational motion from one place to another (with all its parts
moving in the same direction) and
they can affect its rotational motion about an axis (or pivot/fulcrum point).
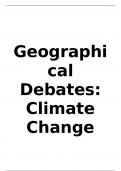
Two equal and opposite forces meeting at the same point in a body are said to be con-current and
co-planar. These forces do not affect the state of motion of the body at all because they are in
translational and rotational equilibrium (see upper set of tug boat diagrams). However if the forces
are offset (i.e. not con-current) then the translational equilibrium is still maintained but the rotational
equilibrium is not and rotation occurs (see lower set of tug boat diagrams).
IDENTICAL
AND IN-LINE
SIDE
THRUSTERS
TWO IDENTICAL AND OPPOSITE FORCES
MEETING AT THE SAME POINT GIVE BOTH
TRANSLATIONAL AND ROTATIONAL
EQUILIBRIUM
IDENTICAL
BUT
OFF-SET
SIDE
THRUSTERS
TWO EQUAL AND OPPOSITE FORCES
WHICH ARE OFFSET GIVE TRANSLATIONAL EQUILIBRIUM BU
Hence for a body to be in equilibrium:
the forces acting upon it must balance and
their clockwise and anticlockwise moments about any point must be equal.
1
,The topic area of STATICS is divided into four sections.
The first is an introduction to the nature of forces and how they may be illustrated using free
body diagrams (FBD) and vectors. The technique of combining two or more forces into one
single force, known as a resultant force, is outlined as is the reverse procedure of resolving, or
splitting, a force into components. The nature of, and requirements for, equilibrium is also
covered with reference to Newton's third law.
The second section deals with the graphical solution of translational type problems (i.e. ones
where all the forces are con-current and co-planar).
The rotational effects of forces (i.e. turning moments) and the requirements for equilibrium are
considered in the third section. The principle of the lever and its ability to increase the
magnitude of a force is also covered.
The fourth section looks at the numerical solution of translational and translational/rotational
problems. Many of these problems are a repeat of ones solved graphically in section 2 and
allow a comparison of the two methods to be made.
The content of each section is:
1. INTRODUCTION
1.1 - Mass, force and weight.
1.2 - Free body diagrams.
1.3 - Representation of a force by a vector.
1.4 - Resultant force (FR) and parallelogram of forces.
1.5 - Newton's third law, equilibrium and equilibrant force (FE).
1.6 - Resolution of forces.
2. GRAPHICAL METHODS FOR SOLVING TRANSLATIONAL PROBLEMS
2.1 - Graphical solution of equilibrium problems using the triangle of forces.
2.2 - Graphical solution of equilibrium problems using the polygon of forces and Bows Notation.
3. ROTATIONAL EFFECTS OF FORCES
3.1 - Moment of a force.
3.2 - Sign convention.
3.3 - Balance of moments.
3.4 - Types of levers.
3.5 - Equilibrium conditions for the lever.
3.6 - Application of the principle of moments.
3.7 - Miscellaneous problems.
4. NUMERICAL SOLUTION OF TRANSLATIONAL AND ROTATIONAL PROBLEMS
4.1 - Numerical solution of translational problems (i.e. all the forces are concurrent).
4.2 - Free body diagrams.
4.3 - Numerical solution of combined translational and rotational problems.
2
, SECTION 1 - INTRODUCTION
1.1 MASS, FORCE AND WEIGHT
MASS
The mass of a body is the quantity of matter it contains.
It is measured in kilograms (kg) or multiples/sub-multiples of this (i.e. milligrams, grams,
tonnes, megatonnes etc).
It is a constant quantity regardless of position/location (i.e. earth's centre/earth's surface/on the
moon *).
Matter can be solid, liquid or gas.
A “mass” can normally be seen.
FORCE
A force is simply a pull or a push on a body.
It is measured in newtons (N) or multiples/sub-multiples of this (i.e. millinewtons, kilonewtons,
meganewtons etc).
Forces can vary.
A force cannot be seen but its effects can. For example a force applied to a body has the effect
of causing:
1. Movement to begin or change (see Newton's Laws).
2. Shape to change (i.e. lengthening, shortening, bending and twisting).
WEIGHT
This is a particular type of force caused by gravity.
The weight of a body is the force due to gravity acting on the body.
Hence weight can vary due to position/location of the body (* see above).
Weight always acts vertically downwards and may be taken as a concentrated force acting
through the centre of gravity of the body.
HOW ARE MASS AND FORCE RELATED?
Mass is a base unit (kg).
Force is a derived unit (N).
Acceleration is also a derived unit (m s-2).
The unit of force (i.e. the newton) is derived in the following way:
Definition: a newton is a force which when applied to a body having a mass of
1 kilogram gives it an acceleration of 1 metre second-2.
1 newton = 1 kilogram x 1 metre second-2
of force of mass
Or more generally:
Force = Mass x Acceleration
F = mxa Units: N = kg m s-2
NOTE: this is a very important equation in Engineering Principles/Mechanics whether statics or
dynamics are being studied. It may seem odd that ACCELERATION is considered in the study of
STATICS. However, referring to that particular force called WEIGHT which acts vertically
downwards, we have:
3
in equilibrium when the forces on it balance each other so that it either:
remains at rest or, if it is moving,
remains in a state of uniform motion (i.e. constant speed in a straight line).
To understand equilibrium it has to be recognised that forces can influence, or try to influence, the
motion of a body in two ways:
they can affect its translational motion from one place to another (with all its parts
moving in the same direction) and
they can affect its rotational motion about an axis (or pivot/fulcrum point).
Two equal and opposite forces meeting at the same point in a body are said to be con-current and
co-planar. These forces do not affect the state of motion of the body at all because they are in
translational and rotational equilibrium (see upper set of tug boat diagrams). However if the forces
are offset (i.e. not con-current) then the translational equilibrium is still maintained but the rotational
equilibrium is not and rotation occurs (see lower set of tug boat diagrams).
IDENTICAL
AND IN-LINE
SIDE
THRUSTERS
TWO IDENTICAL AND OPPOSITE FORCES
MEETING AT THE SAME POINT GIVE BOTH
TRANSLATIONAL AND ROTATIONAL
EQUILIBRIUM
IDENTICAL
BUT
OFF-SET
SIDE
THRUSTERS
TWO EQUAL AND OPPOSITE FORCES
WHICH ARE OFFSET GIVE TRANSLATIONAL EQUILIBRIUM BU
Hence for a body to be in equilibrium:
the forces acting upon it must balance and
their clockwise and anticlockwise moments about any point must be equal.
1
,The topic area of STATICS is divided into four sections.
The first is an introduction to the nature of forces and how they may be illustrated using free
body diagrams (FBD) and vectors. The technique of combining two or more forces into one
single force, known as a resultant force, is outlined as is the reverse procedure of resolving, or
splitting, a force into components. The nature of, and requirements for, equilibrium is also
covered with reference to Newton's third law.
The second section deals with the graphical solution of translational type problems (i.e. ones
where all the forces are con-current and co-planar).
The rotational effects of forces (i.e. turning moments) and the requirements for equilibrium are
considered in the third section. The principle of the lever and its ability to increase the
magnitude of a force is also covered.
The fourth section looks at the numerical solution of translational and translational/rotational
problems. Many of these problems are a repeat of ones solved graphically in section 2 and
allow a comparison of the two methods to be made.
The content of each section is:
1. INTRODUCTION
1.1 - Mass, force and weight.
1.2 - Free body diagrams.
1.3 - Representation of a force by a vector.
1.4 - Resultant force (FR) and parallelogram of forces.
1.5 - Newton's third law, equilibrium and equilibrant force (FE).
1.6 - Resolution of forces.
2. GRAPHICAL METHODS FOR SOLVING TRANSLATIONAL PROBLEMS
2.1 - Graphical solution of equilibrium problems using the triangle of forces.
2.2 - Graphical solution of equilibrium problems using the polygon of forces and Bows Notation.
3. ROTATIONAL EFFECTS OF FORCES
3.1 - Moment of a force.
3.2 - Sign convention.
3.3 - Balance of moments.
3.4 - Types of levers.
3.5 - Equilibrium conditions for the lever.
3.6 - Application of the principle of moments.
3.7 - Miscellaneous problems.
4. NUMERICAL SOLUTION OF TRANSLATIONAL AND ROTATIONAL PROBLEMS
4.1 - Numerical solution of translational problems (i.e. all the forces are concurrent).
4.2 - Free body diagrams.
4.3 - Numerical solution of combined translational and rotational problems.
2
, SECTION 1 - INTRODUCTION
1.1 MASS, FORCE AND WEIGHT
MASS
The mass of a body is the quantity of matter it contains.
It is measured in kilograms (kg) or multiples/sub-multiples of this (i.e. milligrams, grams,
tonnes, megatonnes etc).
It is a constant quantity regardless of position/location (i.e. earth's centre/earth's surface/on the
moon *).
Matter can be solid, liquid or gas.
A “mass” can normally be seen.
FORCE
A force is simply a pull or a push on a body.
It is measured in newtons (N) or multiples/sub-multiples of this (i.e. millinewtons, kilonewtons,
meganewtons etc).
Forces can vary.
A force cannot be seen but its effects can. For example a force applied to a body has the effect
of causing:
1. Movement to begin or change (see Newton's Laws).
2. Shape to change (i.e. lengthening, shortening, bending and twisting).
WEIGHT
This is a particular type of force caused by gravity.
The weight of a body is the force due to gravity acting on the body.
Hence weight can vary due to position/location of the body (* see above).
Weight always acts vertically downwards and may be taken as a concentrated force acting
through the centre of gravity of the body.
HOW ARE MASS AND FORCE RELATED?
Mass is a base unit (kg).
Force is a derived unit (N).
Acceleration is also a derived unit (m s-2).
The unit of force (i.e. the newton) is derived in the following way:
Definition: a newton is a force which when applied to a body having a mass of
1 kilogram gives it an acceleration of 1 metre second-2.
1 newton = 1 kilogram x 1 metre second-2
of force of mass
Or more generally:
Force = Mass x Acceleration
F = mxa Units: N = kg m s-2
NOTE: this is a very important equation in Engineering Principles/Mechanics whether statics or
dynamics are being studied. It may seem odd that ACCELERATION is considered in the study of
STATICS. However, referring to that particular force called WEIGHT which acts vertically
downwards, we have:
3