Solution Manual
An Introduction to Sonar Systems Engineering,
2nd Edition by Lawrence J. Ziomek All Chapters 1-15 Covered
, Chapter 1
j
Sectionj1.2
1-1 Verifyj(1.2-12)jandj(1.2-13).
rj jr0j j j j j
j j j j j j
j j j
2 2
r +jr0 −j2(rj r0j)
Sincej rj j rj ,j r0j j r0j ,jandj rj jrrˆj,jthen
rj jr0j rj2+jrj −02j2r(jrˆ•jrj ) 0
0r2 j
r j1j+jj jj−2 j2j
2
r r 0
r
j 1j+jb
j j r 2
j rˆ•jr
wherej bj 0
2j 0j
j rj
j j j j
r
1
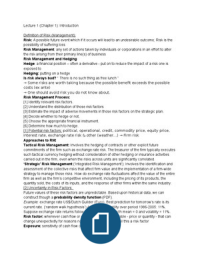
,1-2 UsingjFig.jP1-2,jshowjthat
uj jcos j sin jcos j ,
j
vj jcosj j sin jsin j ,
j
and
wj jcos j j cos j ,
wherej uj,j vj,jandj wj arejdimensionlessjdirectionjcosinesjwithjrespectjtojthej Xj,j Yj,jandj Z
axes,jrespectively.
Z
(r, , )
r
Y
X
FigurejP1-2
2
, Z
rjsin
(r, , )
r
Y
rjsin
X
r rjsin
rjcosj rjcosj
X X
rcos
j j
cos j
rjsin
uj jsin jcos j cos
j
3
An Introduction to Sonar Systems Engineering,
2nd Edition by Lawrence J. Ziomek All Chapters 1-15 Covered
, Chapter 1
j
Sectionj1.2
1-1 Verifyj(1.2-12)jandj(1.2-13).
rj jr0j j j j j
j j j j j j
j j j
2 2
r +jr0 −j2(rj r0j)
Sincej rj j rj ,j r0j j r0j ,jandj rj jrrˆj,jthen
rj jr0j rj2+jrj −02j2r(jrˆ•jrj ) 0
0r2 j
r j1j+jj jj−2 j2j
2
r r 0
r
j 1j+jb
j j r 2
j rˆ•jr
wherej bj 0
2j 0j
j rj
j j j j
r
1
,1-2 UsingjFig.jP1-2,jshowjthat
uj jcos j sin jcos j ,
j
vj jcosj j sin jsin j ,
j
and
wj jcos j j cos j ,
wherej uj,j vj,jandj wj arejdimensionlessjdirectionjcosinesjwithjrespectjtojthej Xj,j Yj,jandj Z
axes,jrespectively.
Z
(r, , )
r
Y
X
FigurejP1-2
2
, Z
rjsin
(r, , )
r
Y
rjsin
X
r rjsin
rjcosj rjcosj
X X
rcos
j j
cos j
rjsin
uj jsin jcos j cos
j
3