, O N E # t # t
Introduction
ANSWERS TO REVIEW QUESTIONS #t #t #t
1. Guided missiles, automatic gain control in radio receivers, satellite tracking antenna
#t #t #t #t #t #t #t #t #t #t
2. Yes - power gain, remote control, parameter conversion; No - Expense, complexity
#t #t #t #t #t #t #t #t #t #t #t
3. Motor, low pass filter, inertia supported between two bearings
#t #t #t #t #t #t #t #t
4. Closed-
loop systems compensate for disturbances by measuring the response, comparing it to the inpu
#t #t #t #t #t #t #t #t #t #t #t #t #t
t response (the desired output), and then correcting the output response.
#t #t #t #t #t #t #t #t #t #t
5. Under the condition that the feedback element is other than unity
#t #t #t #t #t #t #t #t #t #t
6. Actuating signal #t
7. Multiple subsystems can time share the controller. Any adjustments to the controller can b
#t #t #t #t #t #t #t #t #t #t #t #t #t
e implemented with simply software changes.
#t #t #t #t #t
8. Stability, transient response, and steady-state error
#t #t #t #t #t
9. Steady-state, transient #t
10. It follows a growing transient response until the steady-
#t #t #t #t #t #t #t #t
state response is no longer visible. The system will either destroy itself, reach an equilibrium sta
#t #t #t #t #t #t #t #t #t #t #t #t #t #t #t
te because of saturation in driving amplifiers, or hit limit stops.
#t #t #t #t #t #t #t #t #t #t
11. Transient response #t
12. True
13. Transfer function, state-space, differential equations
#t #t #t #t
14. Transfer function - the Laplace transform of the differential equation
#t #t #t #t #t #t #t #t #t
State-space - representation of an nth order differential equation as n simultaneous first-
#t #t #t #t #t #t #t #t #t #t #t #t
order differential equations
#t #t
Differential equation - Modeling a system with its differential equation
#t #t #t #t #t #t #t #t #t
SOLUTIONS TO PROBLEMS #t #t
50 volts #t #t
1. Five turns yields 50 v. Therefore K = 1.59
5 x 2 rad
#t #t #t #t #t #t #t #t
= #t #t #t
,
, 2 Chapter 1: #t Introductio
n
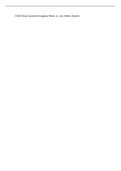
2.
Desired#tt Temperature Voltage#t Actual#ttemperatur
Fuel#tflo
emperature #tdifference
difference e
w
#t
+ Amplifier#tand
Thermostat Heater
#tvalves
-
3.
Desired Input#t Error#t Aileron# Roll Roll#t
#troll#ta voltage voltage positio
t #trat angle
ngle n e
+
controls
-
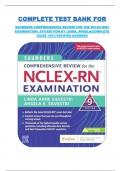
4.
Input#t
Speed
Desired voltage Actual
Error#t
#t Motor#ta
#tspeed #tspee
+ voltage nd#tdriv
transducer Amplifier e d
system
-
Dancer
Dancer#t
position#tsen
Voltage#tpr dynamics
sor
oportional
to#tactual#tspeed
5.
Input#t Power Rod#t
voltage Error#t
#t
position
Desired voltage Motor#t Actual
power and#tdri #tpowe
Transducer
+ Amplifier ve#tsyst Reactor r
em
-
Sensor#t&#t
transducer
Voltage#tpro
portional
to#tactual#tpower
Introduction
ANSWERS TO REVIEW QUESTIONS #t #t #t
1. Guided missiles, automatic gain control in radio receivers, satellite tracking antenna
#t #t #t #t #t #t #t #t #t #t
2. Yes - power gain, remote control, parameter conversion; No - Expense, complexity
#t #t #t #t #t #t #t #t #t #t #t
3. Motor, low pass filter, inertia supported between two bearings
#t #t #t #t #t #t #t #t
4. Closed-
loop systems compensate for disturbances by measuring the response, comparing it to the inpu
#t #t #t #t #t #t #t #t #t #t #t #t #t
t response (the desired output), and then correcting the output response.
#t #t #t #t #t #t #t #t #t #t
5. Under the condition that the feedback element is other than unity
#t #t #t #t #t #t #t #t #t #t
6. Actuating signal #t
7. Multiple subsystems can time share the controller. Any adjustments to the controller can b
#t #t #t #t #t #t #t #t #t #t #t #t #t
e implemented with simply software changes.
#t #t #t #t #t
8. Stability, transient response, and steady-state error
#t #t #t #t #t
9. Steady-state, transient #t
10. It follows a growing transient response until the steady-
#t #t #t #t #t #t #t #t
state response is no longer visible. The system will either destroy itself, reach an equilibrium sta
#t #t #t #t #t #t #t #t #t #t #t #t #t #t #t
te because of saturation in driving amplifiers, or hit limit stops.
#t #t #t #t #t #t #t #t #t #t
11. Transient response #t
12. True
13. Transfer function, state-space, differential equations
#t #t #t #t
14. Transfer function - the Laplace transform of the differential equation
#t #t #t #t #t #t #t #t #t
State-space - representation of an nth order differential equation as n simultaneous first-
#t #t #t #t #t #t #t #t #t #t #t #t
order differential equations
#t #t
Differential equation - Modeling a system with its differential equation
#t #t #t #t #t #t #t #t #t
SOLUTIONS TO PROBLEMS #t #t
50 volts #t #t
1. Five turns yields 50 v. Therefore K = 1.59
5 x 2 rad
#t #t #t #t #t #t #t #t
= #t #t #t
,
, 2 Chapter 1: #t Introductio
n
2.
Desired#tt Temperature Voltage#t Actual#ttemperatur
Fuel#tflo
emperature #tdifference
difference e
w
#t
+ Amplifier#tand
Thermostat Heater
#tvalves
-
3.
Desired Input#t Error#t Aileron# Roll Roll#t
#troll#ta voltage voltage positio
t #trat angle
ngle n e
+
controls
-
4.
Input#t
Speed
Desired voltage Actual
Error#t
#t Motor#ta
#tspeed #tspee
+ voltage nd#tdriv
transducer Amplifier e d
system
-
Dancer
Dancer#t
position#tsen
Voltage#tpr dynamics
sor
oportional
to#tactual#tspeed
5.
Input#t Power Rod#t
voltage Error#t
#t
position
Desired voltage Motor#t Actual
power and#tdri #tpowe
Transducer
+ Amplifier ve#tsyst Reactor r
em
-
Sensor#t&#t
transducer
Voltage#tpro
portional
to#tactual#tpower