SOLUTIONS MANUAL AN
INTRODUCTION TO SONAR
SYSTEMS ENGINEERING SECOND
EDITION LAWRENCE J. ZIOMEK
COMPLETE CHAPTER SOLUTIONS
MANUAL ARE INCLUDED (CH 1 TO
15)LATEST UPDATE 2025/2026 A+
, Chapter 1
SECTION 1.2
1-1 Verify (1.2-12) And (1.2-13).
R R0
2
2
r r0 2(r r0 )
Since R R , R0 R0 , And R Rrˆ , Then
R R0 r2 r 02 2r( rˆ• r0 )
r2
r2 1 02 2 0
r r
R 1 b
R 2 Rˆ• R
Where B 2 0
0 R
R
1
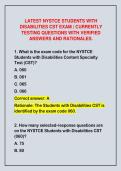
,1-2 Using Fig. P1-2, Show
That
U Cos Sin Cos ,
V Cos Sin Sin ,
And
W Cos Cos ,
Where U , V , And W Are Dimensionless Direction Cosines With Respect To The X ,
Y , And Z
Axes, Respectively.
Z
(r, , )
r
Y
X
Figure P1-2
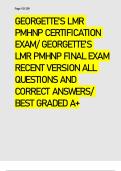
2
, Z
r sin
(r, , )
r
Y
r sin
X
r r sin
R Cos R Cos
X X
R Cos
Cos
R Sin
U Sin Cos Cos
3
INTRODUCTION TO SONAR
SYSTEMS ENGINEERING SECOND
EDITION LAWRENCE J. ZIOMEK
COMPLETE CHAPTER SOLUTIONS
MANUAL ARE INCLUDED (CH 1 TO
15)LATEST UPDATE 2025/2026 A+
, Chapter 1
SECTION 1.2
1-1 Verify (1.2-12) And (1.2-13).
R R0
2
2
r r0 2(r r0 )
Since R R , R0 R0 , And R Rrˆ , Then
R R0 r2 r 02 2r( rˆ• r0 )
r2
r2 1 02 2 0
r r
R 1 b
R 2 Rˆ• R
Where B 2 0
0 R
R
1
,1-2 Using Fig. P1-2, Show
That
U Cos Sin Cos ,
V Cos Sin Sin ,
And
W Cos Cos ,
Where U , V , And W Are Dimensionless Direction Cosines With Respect To The X ,
Y , And Z
Axes, Respectively.
Z
(r, , )
r
Y
X
Figure P1-2
2
, Z
r sin
(r, , )
r
Y
r sin
X
r r sin
R Cos R Cos
X X
R Cos
Cos
R Sin
U Sin Cos Cos
3