Samenvatting BW Wiskunde
Hendrik Jan, van der Kolk
December 2022
Tip:
-Aantal handige opgaves is best veel, dus als je ze niet allemaal kan maken, kijk wel ff de
antwoorden door. Klein tipje
1
,Contents
1 Differentiation 4
1.1 Basic Rules . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.2 Kettingregel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.3 Partial Differentiation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.4 Handige Opgaves: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2 Integration 7
2.1 Basic Rules . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.2 Integration by substitution . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.3 Integration in Kinematics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.4 Multiple Integrals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.5 Handige opgaves . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
3 Differential Equations 15
3.1 Kenmerken Differential Equations . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3.2 Solving Diffential Equations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3.2.1 Case 1: Order 1 - Linear - Homogenous . . . . . . . . . . . . . . . . . . . 16
3.2.2 Case 2: Order 1 - Linear - Inhomogenous . . . . . . . . . . . . . . . . . . 16
3.2.3 Case 3: Order 2 - Linear - Homogenous . . . . . . . . . . . . . . . . . . . 19
3.3 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
3.4 Handige opgaves . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
4 Coordinates 23
4.1 2D-space . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
4.1.1 Polar Coordinates . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
4.2 3D-space . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
4.2.1 Spherical Coordinates . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
4.2.2 Cylindrical Coordinates . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
4.3 Omzettingsformules in 3D . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
4.3.1 Spherical coordinates: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
4.3.2 Cylindrical Coordinates . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
4.4 Application . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
4.4.1 Polar coordinates: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
4.4.2 Cylindrical Coordinates: . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
4.4.3 Spherical Coordinates: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
4.5 Handige Opgaves: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
5 Vectors 30
5.1 Algemene dingetjes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
5.2 Basic Manipulations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
5.3 Vector Functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
5.3.1 Diffentieren: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
5.3.2 Integreren: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
5.4 Dot product . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
5.5 Cross product . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
2
, 5.6 Vector Equation of a Line . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
5.7 Handige Opgaves . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
6 Matrices 37
6.1 Equating two matrices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
6.2 Multiplying by a number . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
6.3 Adding and Subtracting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
6.4 Matrix Multiplication . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
6.5 The Inverse Matrix . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
6.5.1 2x2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
6.5.2 3x3 en hoger . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
6.6 The Transpose Matrix . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
6.7 Axes Transformations and Matrices . . . . . . . . . . . . . . . . . . . . . . . . . . 42
6.7.1 Reflection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
6.7.2 Scaling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
6.7.3 Translation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
6.7.4 Rotation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
6.8 Multiple Transformations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
6.9 Object Transformations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
6.10 Determinants . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
6.10.1 2x2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
6.10.2 3x3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
6.10.3 4x4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
6.10.4 3 Handige tips: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
6.11 Handige Opgaves: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
3
,1 Differentiation
1.1 Basic Rules
Differentieren wordt gebruikt om de helling van een functie te bepalen
Differentieren regels:
Sum Rule: f (x) = p(x) ± g(x) → f ′ (x) = p′ (x) ± g ′ (x)
Product rule: f (x) = p(x) ∗ g(x) → f ′ (x) = p′ (x) ∗ g(x) + p(x) ∗ g ′ (x)
p(x) ′ ′ (x)
Quotient Rule: f (x) = g(x) → f ′ (x) = p (x)∗g(x)−p(x)∗g
(g(x))2
For example:
f (x) = 6x + x2 → f ′ (x) = 6 + 2x
f (x) = ex ∗ x2 → f ′ (x) = ex ∗ x2 + ex ∗ 2x
2
f (x) = 2x+1
x2 −1
→ f ′ (x) = 2∗(x −1)−2x(2x+1)
(x2 −1)2
= 2x2 −2−4x2 −2x
(x2 −1)2
= −2x2 −2x−2
(x2 −1)2
Standaard dingen om te weten:
f (x) = xn → f ′ (x) = nxn−1
f (x) = ex → f ′ (x) = ex
f (x) = loga x → f ′ (x) = x ln
1
a
f (x) = ln(x) → f ′ (x) = x1
f (x) = sin x → f ′ (x) = cos x
f (x) = cos x → f ′ (x) = − sin x
f (x) = tan x → f ′ (x) = cos12 x
1.2 Kettingregel
Stel je hebt k(x) = cos(2x), dan heb je de functie f (x) = 2x zitten in de cosinus. Dan kan je
niet meer de standaard afgeleide pakken van de cosinus. Dus moet je de kettingregel gebruiken.
Kettingregel:
k(x) = g(f (x)) → k ′ (x) = g ′ (f (x)) ∗ f ′ (x)
Dit is misschien een beetje een vage definitie, maar het wordt duidelijker met het voorbeeld:
k(x) = cos(2x)
Je ziet de 2 functies: cosinus en 2x. Even beide een naam geven:
g = cos(u) ; u = 2x
Eigenlijk heb je k(x) nu alleen anders geschreven, kijk maar: k(x) = g(u) = cos(u) = cos(2x)
En nu de afgeleide pakken van beide functies
4
, g ′ = −sin(u) ; u′ = 2
De afgeleide van k is dan volgens de kettingregel: k ′ (x) = g ′ ∗ u′ = −sin(u) ∗ 2 Er staat nu
sin(u), maar we weten wat u is, dus uiteindelijk krijg je:
k ′ (x) = −sin(2x) ∗ 2 = −2sin(2x)
Ander voorbeeld: p
k(x) = 3x2 + 2x − 1
√ 1 1
g = u = u 2 → g ′ = 12 u− 2
u = 3x2 + 2x − 1 → u′ = 6x + 2
1 1
Dus k ′ (x) = g ′ ∗ u′ = 12 u− 2 ∗ (6x + 2) = 12 (3x2 + 2x − 1)− 2 ∗ (6x + 2) = √ 6x+2
2 3x2 +2x−1
Je boek noteert het iets anders (Zie pagina 46), maar ik vind persoonlijk mijn manier sneller
en duidelijker. Maar je moet doen, wat jij het makkelijkst vindt
The second derivative, is niets meer dan de tweede afgeleide, dus de afgeleide functie nog een
keer afleiden. Voor de rest niets speciaals.
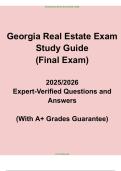
1.3 Partial Differentiation
Partial differentiation wordt gebruik, wanneer je functie depends on meer dan 1 variabele. Tot
nu depende de functie f alleen op de variabele x. Neem bijvoorbeeld z = f (x, y) dan heb je een
drie dimensionale grafiek, als je hem zou plotten. Zie figuur hieronder
Dan kan je de afgeleide in 2 richtingen bepalen. In de x-richting (linker plaatje) of in de y-
richting (rechter plaatje). Je ziet, dat als je de afgeleide in de x-richting bepaalt, dat y constant
5
Hendrik Jan, van der Kolk
December 2022
Tip:
-Aantal handige opgaves is best veel, dus als je ze niet allemaal kan maken, kijk wel ff de
antwoorden door. Klein tipje
1
,Contents
1 Differentiation 4
1.1 Basic Rules . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.2 Kettingregel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.3 Partial Differentiation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.4 Handige Opgaves: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2 Integration 7
2.1 Basic Rules . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.2 Integration by substitution . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.3 Integration in Kinematics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.4 Multiple Integrals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.5 Handige opgaves . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
3 Differential Equations 15
3.1 Kenmerken Differential Equations . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3.2 Solving Diffential Equations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3.2.1 Case 1: Order 1 - Linear - Homogenous . . . . . . . . . . . . . . . . . . . 16
3.2.2 Case 2: Order 1 - Linear - Inhomogenous . . . . . . . . . . . . . . . . . . 16
3.2.3 Case 3: Order 2 - Linear - Homogenous . . . . . . . . . . . . . . . . . . . 19
3.3 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
3.4 Handige opgaves . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
4 Coordinates 23
4.1 2D-space . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
4.1.1 Polar Coordinates . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
4.2 3D-space . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
4.2.1 Spherical Coordinates . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
4.2.2 Cylindrical Coordinates . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
4.3 Omzettingsformules in 3D . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
4.3.1 Spherical coordinates: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
4.3.2 Cylindrical Coordinates . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
4.4 Application . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
4.4.1 Polar coordinates: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
4.4.2 Cylindrical Coordinates: . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
4.4.3 Spherical Coordinates: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
4.5 Handige Opgaves: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
5 Vectors 30
5.1 Algemene dingetjes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
5.2 Basic Manipulations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
5.3 Vector Functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
5.3.1 Diffentieren: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
5.3.2 Integreren: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
5.4 Dot product . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
5.5 Cross product . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
2
, 5.6 Vector Equation of a Line . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
5.7 Handige Opgaves . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
6 Matrices 37
6.1 Equating two matrices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
6.2 Multiplying by a number . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
6.3 Adding and Subtracting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
6.4 Matrix Multiplication . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
6.5 The Inverse Matrix . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
6.5.1 2x2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
6.5.2 3x3 en hoger . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
6.6 The Transpose Matrix . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
6.7 Axes Transformations and Matrices . . . . . . . . . . . . . . . . . . . . . . . . . . 42
6.7.1 Reflection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
6.7.2 Scaling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
6.7.3 Translation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
6.7.4 Rotation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
6.8 Multiple Transformations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
6.9 Object Transformations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
6.10 Determinants . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
6.10.1 2x2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
6.10.2 3x3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
6.10.3 4x4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
6.10.4 3 Handige tips: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
6.11 Handige Opgaves: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
3
,1 Differentiation
1.1 Basic Rules
Differentieren wordt gebruikt om de helling van een functie te bepalen
Differentieren regels:
Sum Rule: f (x) = p(x) ± g(x) → f ′ (x) = p′ (x) ± g ′ (x)
Product rule: f (x) = p(x) ∗ g(x) → f ′ (x) = p′ (x) ∗ g(x) + p(x) ∗ g ′ (x)
p(x) ′ ′ (x)
Quotient Rule: f (x) = g(x) → f ′ (x) = p (x)∗g(x)−p(x)∗g
(g(x))2
For example:
f (x) = 6x + x2 → f ′ (x) = 6 + 2x
f (x) = ex ∗ x2 → f ′ (x) = ex ∗ x2 + ex ∗ 2x
2
f (x) = 2x+1
x2 −1
→ f ′ (x) = 2∗(x −1)−2x(2x+1)
(x2 −1)2
= 2x2 −2−4x2 −2x
(x2 −1)2
= −2x2 −2x−2
(x2 −1)2
Standaard dingen om te weten:
f (x) = xn → f ′ (x) = nxn−1
f (x) = ex → f ′ (x) = ex
f (x) = loga x → f ′ (x) = x ln
1
a
f (x) = ln(x) → f ′ (x) = x1
f (x) = sin x → f ′ (x) = cos x
f (x) = cos x → f ′ (x) = − sin x
f (x) = tan x → f ′ (x) = cos12 x
1.2 Kettingregel
Stel je hebt k(x) = cos(2x), dan heb je de functie f (x) = 2x zitten in de cosinus. Dan kan je
niet meer de standaard afgeleide pakken van de cosinus. Dus moet je de kettingregel gebruiken.
Kettingregel:
k(x) = g(f (x)) → k ′ (x) = g ′ (f (x)) ∗ f ′ (x)
Dit is misschien een beetje een vage definitie, maar het wordt duidelijker met het voorbeeld:
k(x) = cos(2x)
Je ziet de 2 functies: cosinus en 2x. Even beide een naam geven:
g = cos(u) ; u = 2x
Eigenlijk heb je k(x) nu alleen anders geschreven, kijk maar: k(x) = g(u) = cos(u) = cos(2x)
En nu de afgeleide pakken van beide functies
4
, g ′ = −sin(u) ; u′ = 2
De afgeleide van k is dan volgens de kettingregel: k ′ (x) = g ′ ∗ u′ = −sin(u) ∗ 2 Er staat nu
sin(u), maar we weten wat u is, dus uiteindelijk krijg je:
k ′ (x) = −sin(2x) ∗ 2 = −2sin(2x)
Ander voorbeeld: p
k(x) = 3x2 + 2x − 1
√ 1 1
g = u = u 2 → g ′ = 12 u− 2
u = 3x2 + 2x − 1 → u′ = 6x + 2
1 1
Dus k ′ (x) = g ′ ∗ u′ = 12 u− 2 ∗ (6x + 2) = 12 (3x2 + 2x − 1)− 2 ∗ (6x + 2) = √ 6x+2
2 3x2 +2x−1
Je boek noteert het iets anders (Zie pagina 46), maar ik vind persoonlijk mijn manier sneller
en duidelijker. Maar je moet doen, wat jij het makkelijkst vindt
The second derivative, is niets meer dan de tweede afgeleide, dus de afgeleide functie nog een
keer afleiden. Voor de rest niets speciaals.
1.3 Partial Differentiation
Partial differentiation wordt gebruik, wanneer je functie depends on meer dan 1 variabele. Tot
nu depende de functie f alleen op de variabele x. Neem bijvoorbeeld z = f (x, y) dan heb je een
drie dimensionale grafiek, als je hem zou plotten. Zie figuur hieronder
Dan kan je de afgeleide in 2 richtingen bepalen. In de x-richting (linker plaatje) of in de y-
richting (rechter plaatje). Je ziet, dat als je de afgeleide in de x-richting bepaalt, dat y constant
5